引言
由于空調(diào)系統(tǒng)的設(shè)計(jì)都是按最不利情況(最大負(fù)荷)考慮的,而實(shí)際運(yùn)行時(shí)能達(dá)到滿(mǎn)負(fù)荷狀況只占10%。如果不對(duì)空調(diào)的運(yùn)行設(shè)備, 尤其是中央制冷系統(tǒng)進(jìn)行相應(yīng)的調(diào)節(jié), 那么將會(huì)影響整個(gè)空調(diào)系統(tǒng)的調(diào)節(jié)品質(zhì),浪費(fèi)能源和費(fèi)用,并且這些設(shè)備也不是在最佳工況下運(yùn)行, 無(wú)法滿(mǎn)足對(duì)舒適性的要求?,F(xiàn)代大型公共建筑多數(shù)其中空調(diào)、制冷與供熱設(shè)備占40%。將自動(dòng)控制用于暖通空調(diào)系統(tǒng)已勢(shì)在必行采用自動(dòng)控制可以使系統(tǒng)節(jié)約 10%~15% 的運(yùn)行費(fèi)用,有的系統(tǒng)可以高達(dá)25%~30%。[1]
在暖通空調(diào)系統(tǒng)的過(guò)程控制中,控制對(duì)象非常復(fù)雜,有些控制環(huán)節(jié)表現(xiàn)出很強(qiáng)的時(shí)滯、時(shí)變、非線(xiàn)性的特性,目前HVAC系統(tǒng)溫度、濕度、空氣污染度 分別獨(dú)立控制,控制器都是采用PID控制器,并且控制器參數(shù)是固定的。外界環(huán)境發(fā)生變化,特別是在濕度和房間負(fù)荷變化較大,其送風(fēng)溫度和靜壓力的控制效果 差。由于空調(diào)控制系統(tǒng)的被控對(duì)象是房間的溫度場(chǎng),它與空調(diào)進(jìn)行換熱的工況相當(dāng)復(fù)雜,制約因素太多,對(duì)這種大滯后、強(qiáng)擾動(dòng)且被控對(duì)象未知或是時(shí)變的系統(tǒng)實(shí)施 常規(guī)PID控制往往效果欠佳。因此,需對(duì)PID參數(shù)進(jìn)行整定以獲得最佳控制參數(shù)。[2]
1 空調(diào)系統(tǒng)的控制原理
以中央空調(diào)水系統(tǒng)的自動(dòng)控制系統(tǒng)為例,其他如風(fēng)系統(tǒng)、冷凍水系統(tǒng)、冷卻水系統(tǒng)類(lèi)似。
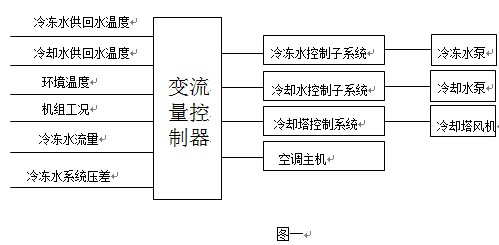
因?yàn)槎髁靠刂拼嬖诤艽蟮哪茉蠢速M(fèi),因此在暖通空調(diào)系統(tǒng)中通常對(duì)水泵、風(fēng)機(jī)、冷水機(jī)組進(jìn)行變流量控制??刂葡到y(tǒng)中通過(guò)采集系統(tǒng)中的流量、溫度等 參數(shù),并通過(guò)模糊運(yùn)算得到與之對(duì)應(yīng)的控制參數(shù)。各空調(diào)系統(tǒng)再根據(jù)這些控制參數(shù)的變化利用變頻技術(shù),改變系統(tǒng)的流量,溫度等。從而使整個(gè)空調(diào)系統(tǒng)始終處于最 高效的運(yùn)行狀態(tài)。如下圖[3]
2 模糊PID控制技術(shù)原理
2.1 簡(jiǎn)述傳統(tǒng)PID控制
在自動(dòng)控制系統(tǒng)中,控制器是很重要的組成部分??刂破鲗⑾到y(tǒng)的被控變量與給定值進(jìn)行比較,得到偏差,然后把某種特定的控制規(guī)律(即控制器的輸入 信號(hào)變化規(guī)律),控制生產(chǎn)過(guò)程,使被控變量等于給定值。連續(xù)控制規(guī)律可以分為比例、比例積分、比例微分和比例積分微分控制規(guī)律。比例、積分、微分分別用 P、I、D表示。因此PID控制就是比例積分微分控制。比例調(diào)節(jié)的顯著特點(diǎn)是有差調(diào)節(jié),靜差不可避免,隨干擾變化而變化。為能自動(dòng)消除靜差,需要采用比例 積分控制器。而為了提高控制系統(tǒng)的過(guò)渡過(guò)程的品質(zhì)指標(biāo),可以采用比例微分控制器。微分調(diào)節(jié)具有預(yù)見(jiàn)性,能抑制被調(diào)量的振蕩,提高系統(tǒng)穩(wěn)定性。因此PID控 制配合了三種調(diào)節(jié)作用,既消除了靜差,又可以提高系統(tǒng)的動(dòng)態(tài)品質(zhì)指標(biāo)。[4]
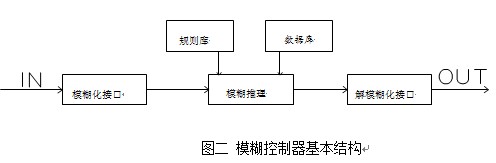
2.2 模糊控制器基本結(jié)構(gòu)
結(jié)構(gòu)如圖
2.3 模糊化接口
在推理前,要將輸入控制器的清晰值轉(zhuǎn)化為模糊集合的形式。人為設(shè)定各模糊子集
1) e=負(fù)大,負(fù)小,零,正小,正大=NB,NS,ZO,PS,PB。2) e=負(fù)大,負(fù)中,負(fù)小,零,正小,正中,正大=NB,NM,NS,ZO,PS,PM,PB。3) e=負(fù)大,負(fù)中,負(fù)小,零負(fù),零正,正小,正中,正大=NB,NM,NS,NZ,PZ,PS,PM,PB。
2.4 模糊PID模糊控制規(guī)則的建立
規(guī)則的建立是從人的直覺(jué)思維出發(fā),推理而來(lái)的一種語(yǔ)言表現(xiàn)形式,并且依靠相關(guān)的專(zhuān)業(yè)人士憑借多年累計(jì)的經(jīng)驗(yàn)和專(zhuān)業(yè)知識(shí)。模糊規(guī)則通常由一系列的 關(guān)系詞連接而成,如if-then,else, also, and, or 等,例如:if A then B 語(yǔ)句。規(guī)則庫(kù)用來(lái)存放全部模糊控制規(guī)則
2.5 模糊推理
模糊推理是根據(jù)模糊控制規(guī)則來(lái)解模糊關(guān)系方程,以此得到模糊控制量。模糊推理由條件聚合、推斷和累加組成
2.6 解模糊化接口
將推理得到的模糊集合轉(zhuǎn)化成清晰值,然后將得到的結(jié)果傳遞給執(zhí)行機(jī)構(gòu)。去模糊方法一般有重心法、中心平均法和最大值法。法
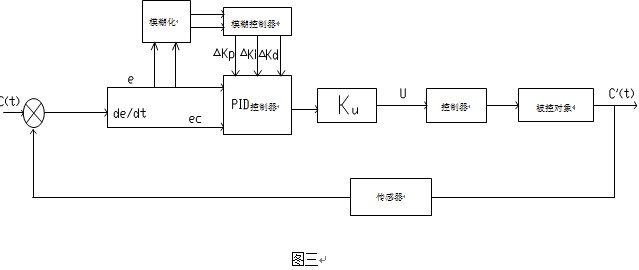
3 模糊PID控制器的設(shè)計(jì)圖[5]
模糊PID控制的設(shè)計(jì)思想是找到PID控制器三個(gè)參數(shù)與溫度偏差e和溫度偏差變化率ec之間對(duì)應(yīng)的模糊關(guān)系在線(xiàn)自整定參數(shù)Δkp ,Δki ,Δkd 值, 在運(yùn)行中通過(guò)不斷檢測(cè)e和ec,再對(duì)3個(gè)參數(shù)kp , ki , kd進(jìn)行在線(xiàn)校正,以滿(mǎn)足在不同偏差e和偏差變化率ec時(shí),對(duì)控制器參數(shù)的不同要求,從而使被控對(duì)象有良好的動(dòng)、靜態(tài)性能, 而且計(jì)算量小,易于單片機(jī)的實(shí)現(xiàn)。
一般來(lái)說(shuō)有如下規(guī)律:
當(dāng)| e | 較大時(shí), kp取較大的值、kd較小的值,為抑制可能出現(xiàn)的過(guò)飽和,應(yīng)對(duì)積分ki 加以限制( ki = 0) 。
當(dāng)| e | 為中等大小時(shí),kp取較小的值,適當(dāng)?shù)膋i 和kd ,同時(shí)保證系統(tǒng)有較快的響應(yīng)速度, kd的取值應(yīng)尤為關(guān)注。
當(dāng)| e | 較小時(shí), kp 和ki 應(yīng)取較大的值;同時(shí)為抑制控制系統(tǒng)在設(shè)定值附近出現(xiàn)震蕩,并考慮系統(tǒng)的抗干擾性能,當(dāng)| ec | 的值較小時(shí), kd 通常取值為中等大小;當(dāng)| ec | 的值較大時(shí), kd 的值可以取小一些。
4 仿真研究[6]
自動(dòng)控制空調(diào)系統(tǒng)的主要任務(wù)是維持空調(diào)房間的溫、濕度在工藝要求的范圍內(nèi)??照{(diào)房間就是空調(diào)系統(tǒng)的被控對(duì)象。其傳遞函數(shù)為:G(s)?? Keτ0s/T0s+1
式中:G(S)為對(duì)象傳遞函數(shù),K 為對(duì)象靜態(tài)放大系數(shù),τ0 為對(duì)象純滯后時(shí)間,T0 為對(duì)象時(shí)間常數(shù)。如采用傳統(tǒng)的PID 控制,只要τ0、T0 改變,要重新設(shè)計(jì)Kp、Ki、Ku 的PID 控制器。采用模糊控制在線(xiàn)對(duì)參數(shù)調(diào)整,不用都重新設(shè)計(jì)PID 控制器。
通過(guò)研究發(fā)現(xiàn),可以看出模型參數(shù)變化后模糊PID 控制的階躍響應(yīng)曲線(xiàn)基本沒(méi)有變化,而普通PID 的控制曲線(xiàn)卻發(fā)生了較大變化。
5 結(jié)論
本文對(duì)空調(diào)系統(tǒng)的控制系統(tǒng)進(jìn)行了分析,并通過(guò)仿真研究,證實(shí)了模糊PID控制提高了控制系統(tǒng)的靜態(tài)性能和動(dòng)態(tài)性能,使溫室的溫度控制系統(tǒng)具有較 強(qiáng)的魯棒性(Robust,表示當(dāng)一個(gè)控制系統(tǒng)中的參數(shù)發(fā)生攝動(dòng)時(shí)系統(tǒng)能否保持正常工作的一種特性或?qū)傩?,自適應(yīng)性;有效地解決了溫室溫度控制系統(tǒng)的存 在的滯后性強(qiáng)、超調(diào)量大等問(wèn)題。從而提高了能源利用率。